기존 Naze32에서 Naza M Lite로 변경했다. (레이싱 → 센서드)
드론 프레임을 모두분리하고 내부 배선등을 정리할 계획이다.

돌아오지 못할 강을 건넌 듯..

어떻게 하면 깔끔한 작업을 할 수 있을까? 이리보고 저리 보았지만 그런거 없다. 그냥 다 자르는게 최고~

한 원통(?)안에 두 모터의 ESC(Electronic Speed Controls)가 들어 있다보니 꽉 찬다.
서로 포개 지지가 않으니 선 길이로 두 모터를 구분하기로 한다. 먼저 모터 측 선6개를 모아 케이블타이로 묶어준다.
위 모터는 길게 아래 모터는 짧게.. 그렇게 하면 반대쪽으로 나오는 선의 길이는 그 반대가 된다.
통일.. 통일하면 나중에 헛갈리지 않는다.


모터를 정리하고 다시 분리했던 원통 프레임을 조립한다.

전원을 정리할 수 있는 PCB도 있던데 진작 알았다면 그런 것도 준비 했을 텐데 아쉽다.
난 '+'와 '-'를 각기 분리하여 땜으로 고정할 계획이다. 높은 전류를 흘려야 해서인지 선이 제법 푸짐(?)하다.

납을 충분히 먹여 땜을하고 수축튜브를 이용해서 마감을 했다.
작업에 열중했더니 그 사진이 없다. 난 원래 하나에 집중하면 다른건 잘 잊는 스탈~이라..ㅡㅡ;;
수축 작업 사진은 아래에서 많이 나오니 참고하면 된다.

각 모터의 번호 순서다. Lobit 320R의 경우 M1 ~ M6까지 연결해야 한다.
그 순서는 우측 이미지를 참고해라.
파랑이 위 모터, 오렌지는 아래 모터이다.
그런데 로빗의 모터 구성은 저 모터 방향 처럼은 안나온다. 그림엔 방향이'CCW'로 모두 구성되어 있으나 로빗은 'CCW' 4개와 'CW'2개로 구성되어 있어 초기 위치대로 그냥 뒀다. (이건 아직 날리기 전이라 맞는지는 모름)
각 ESC에서 나오는 선들을 NAZA FC 그냥 꽂을 수 있었으면 좋을텐데 사이즈가 안 맞다. 그래서 선을 잘라 이었다.
ESC에서 나오는 흰선은 NAZA 제공 선의 갈색과 연결, 검은색은 NAZA의 오렌지와 연결한다.
흰색 -- 오렌지(신호), 검정 -- 갈색(GND), 적색은 VCC이나 ESC에서 나오는 선이 없어 연결 하지 않았다.
깔끔하게 땜질하고 수축튜브도 씌우고 마감에 신경섰다..^^

그런데 ESC두개 작업 후 귀찮아 지기 시작할 무렵 혹시나 하는 맘에 기존 커넥터의 핀만빼써 꽂았더니.. 딱 맞는다..
칼이나 날카로운 것으로 저 메탈 핀을 잡아주는 플라스틱 락킹되는 부분을 살짝 들어 올리며 선을 당기면 핀이 빠진다.

연결해야하는 놈들은 모두 연결했다. 몸체 안이 꽉~ 찬다.

꽉~ 꽉~ 눌러 채웠다.

윗 커버를 덮어주고 송신기의 위치를 잡아준다.
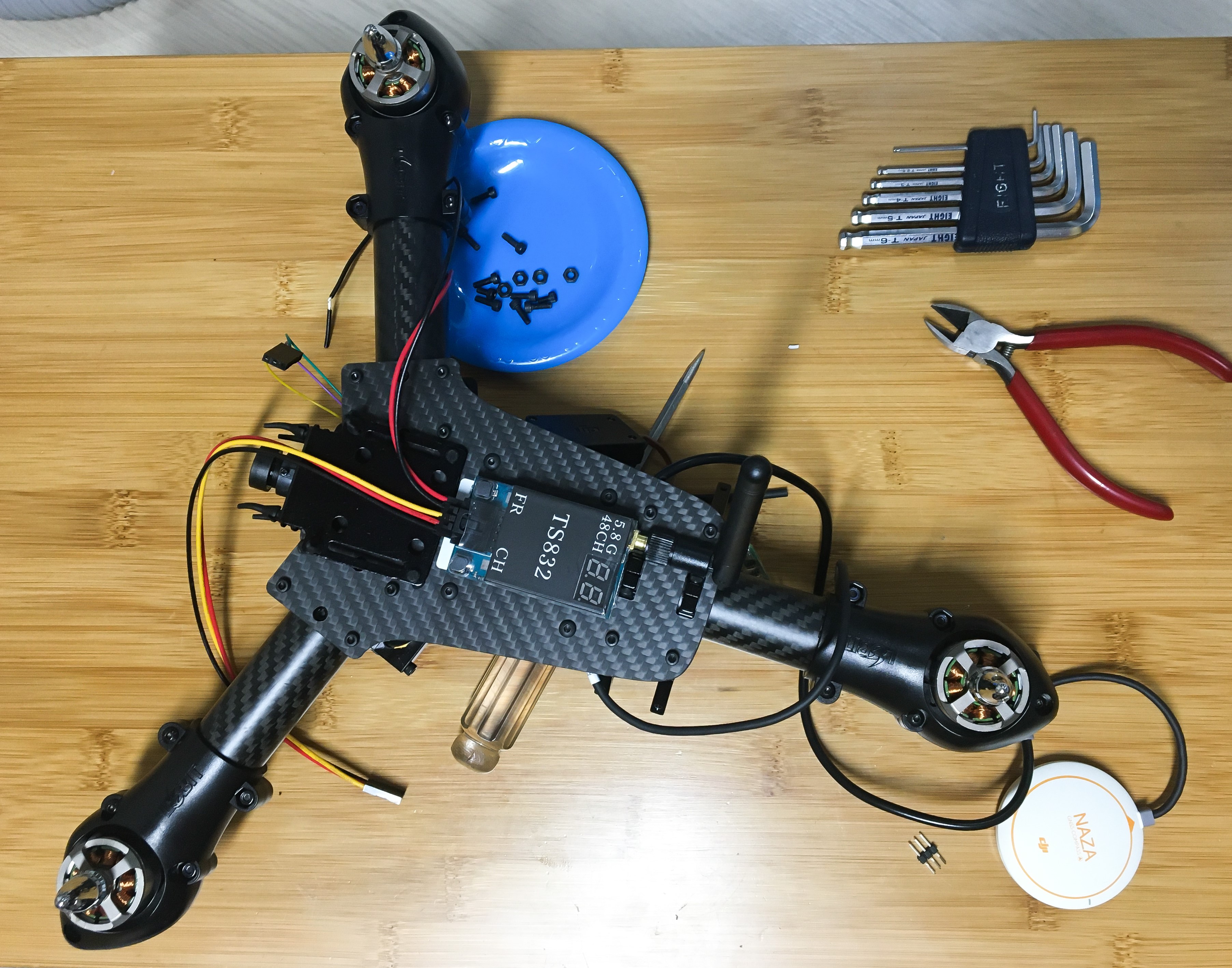
문제가 생겼다. 영상 송신기의 입 출력 전원은 7V ~ 16V 이다. 배터리 전원에 그냥 연결 할 수가 없다.
그리고 내장된 카메라의 전압은 5V이다. 거~ 참.. 지멋대로 만들어 졌다.. 하나로만 통일 됐어도 좋았을 것을..
잠시 조립을 접어두고 회사에서 하나 만들어왔다.
예전에 설계했던 보드에 내장되어 있는 놈을 함석가위로 잘라서 만들었다. 하나는 5V로 또 하나는 12V로...

넓은 수축튜브가 없어 부품 담던 비니루로 싸서 붙혔다.

양 끝은 수축튜브로 마감을 했다. (조금이라도 덜 조잡하라고...)

일단 완성은 했다. 전기를 먹여봐야 하지만.. 뿌듯하다..^^

'드론' 카테고리의 다른 글
| 날아라 LOBIT!! - FPV(Ground Station) (0) | 2019.12.10 |
|---|---|
| 날아라 LOBIT!! - 좌절 ㅡ.,ㅡ;; (0) | 2019.12.09 |
| 날아라 LOBIT!! - 개봉기(Taranis Q X7, XM +) (0) | 2019.11.24 |
| 날아라 LOBIT!! - 개봉기(TS832 AV Transmitter) (0) | 2019.11.24 |
| 날아라 LOBIT!! - 개봉기(드론 짐벌, 2 Axis Brushless Gimbal) (0) | 2019.11.14 |



